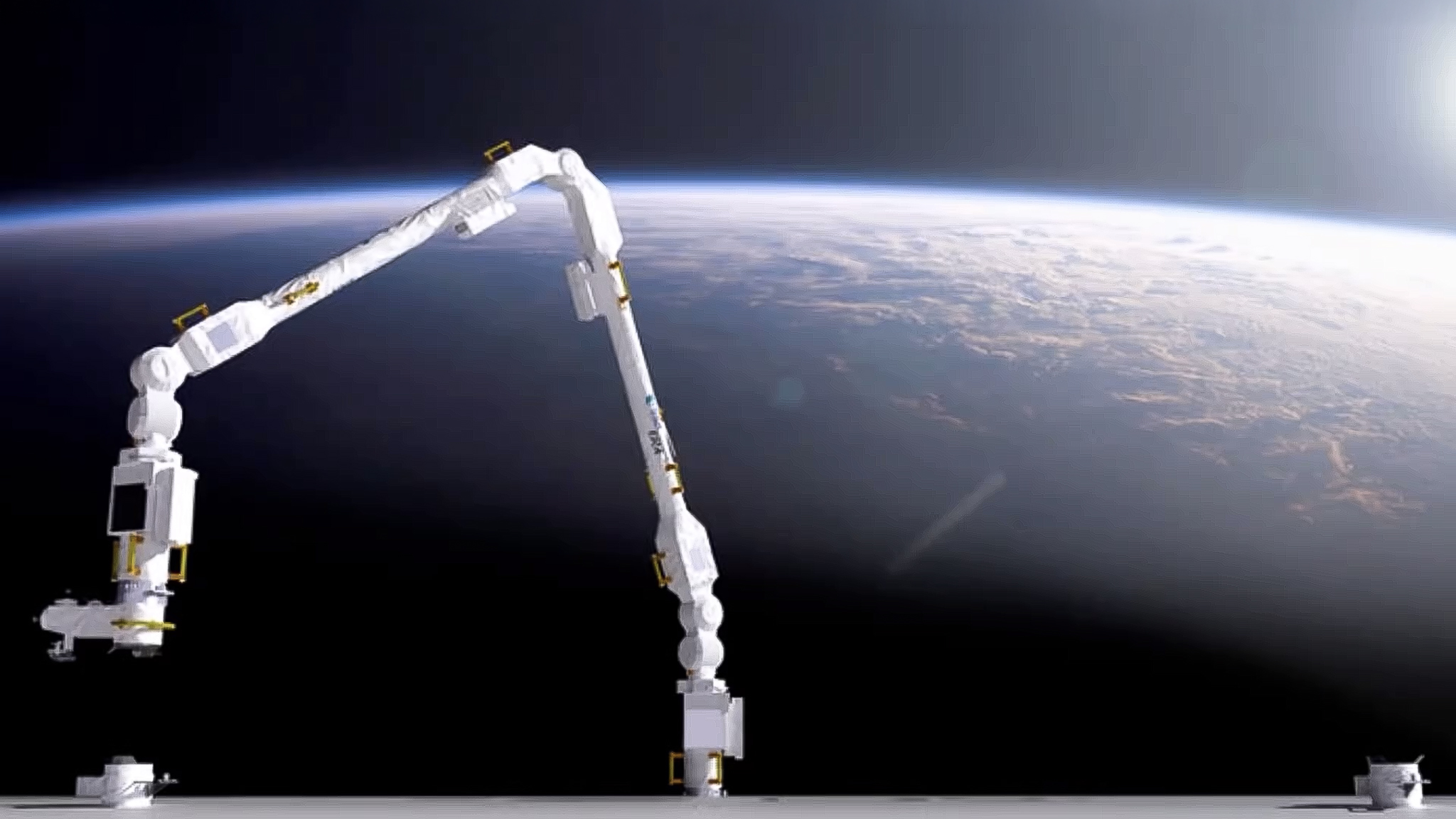
The big day finally arrived on 21 July: the launch of the European Robotic Arm (ERA). The 11-metre robot arm has been attached to the multifunctional Russian laboratory module Nauka and launched by a Proton rocket from Baikonur Cosmodrome in Kazakhstan. It is now underway to the International Space Station, ISS. The journey will take over eight days after which the Nauka module – the ERA’s home base – can be docked with the ISS. From there, the arm will be able to ‘walk’ to other locations on the Russian part of the ISS where it will be able to use cameras to carry out inspections or move cosmonauts or loads (of up to 8000 kg).
Extra arm
The international space station already has two robot arms: Canadarm2 and the Japanese Experiment Module Remote Manipulator System. However, neither of those arms can reach the Russian part of the ISS. That is why ERA has arrived: to get down to work on the Russian part where it will be capable of carrying out numerous tasks automatically or semi-automatically. Cosmonauts (the Russian term for astronauts) can operate the arm from both inside and outside the space station. The positioning of the end effector – the hand of the arm as it were – is then accurate to 5 mm. Control is in real time, based on pre-programmed commands.
Preparation and training
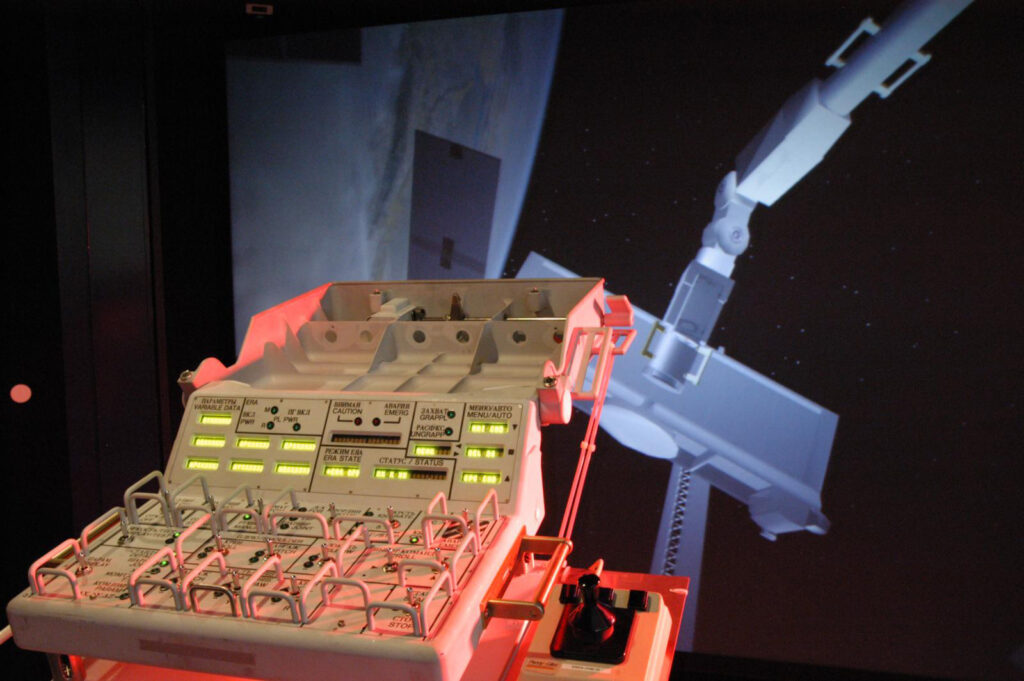
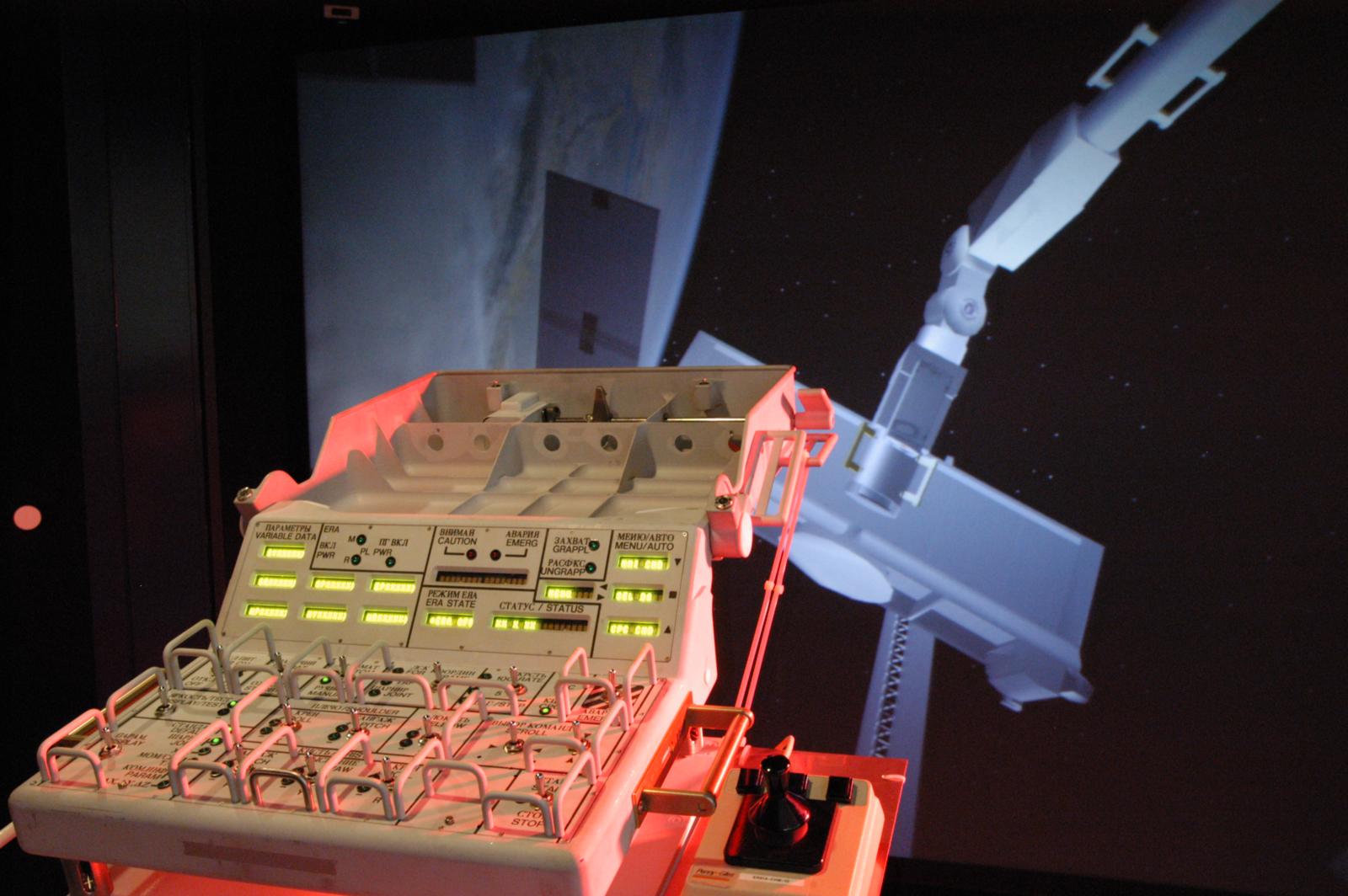
Before it gets that far, though, the missions have to be prepared. And technicians need to be able to provide support while the tasks are being carried out. The users – the cosmonauts and ground staff – need to be trained for this. The Mission Preparation and Training Equipment (MPTE) developed by NLR will have a crucial role in this.
“To get the arm to do what was intended beforehand needs a great deal of preparation,” explains Michel Brouwer, former MPTE project leader at NLR (1996–2006). “Using the MPTE that NLR has developed will let technicians such as the ERA Support Centre staff at ESTEC in Noordwijk practice the actions required beforehand in a simulator. Those pre-programmed actions are then recorded and sent to the ISS via the Russian mission control centre. The astronaut then only needs to indicate when the next steps in the automated sequences need to start. It cuts the number of actions they have to perform themselves down as far as possible.”
In addition to ESTEC in Noordwijk, there are two further sites with MPTEs in Moscow: one at the mission control centre of RSC Energia and the other at the Gagarin cosmonaut training centre.
Cooperation
A consortium of European companies from the Netherlands, Italy, Belgium, Germany, Switzerland, Denmark and Sweden led by Airbus Defence and Space Nederland worked on the project for the European Space Agency, ESA. The consortium also included the Russian RSC Energia in the development and production of ERA.
The Netherlands finally paid two thirds of the total costs of about 360 million euros for ERA. A substantial proportion of that went to NLR for the development, testing, management and use of the MTPE. NLR has thus been involved in this prestigious project since its inception in 1995.
Postponement
In the original plans back in the 1980s, the robot arm would have been part of the European spacecraft Hermes. At the time it was called HERA, the Hermes robotic arm. However, the Hermes project was mothballed a few years later. It was then proposed that the arm should be installed on the Russian space station MIR-2. After Russia joined the ISS initiative as a full partner in 1993, the current plan became a real option. The launch of ERA to the ISS was supposed to happen in 2002. Various technical and programme-related challenges led to the launch being postponed 14 times, however, resulting inter alia in NLR carrying out a mid-life upgrade of the MTPE.
(credits for the photo in the header: ESA)



{kind=link}